
MJA-H系列輕量化關節模組
新品上市• 專為輕量型人形機器人手臂應用研發,提供定制化服務
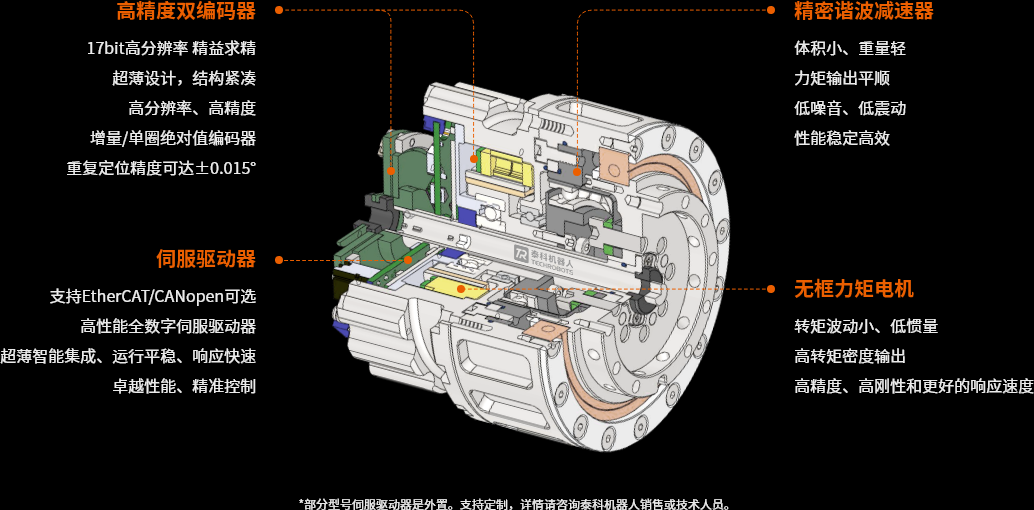
• 集諧波減速器、驅動器、電機、編碼器于一體
• 定位精度高,可靠性穩定性大幅提升
• 精巧結構設計,更輕、更小、更緊湊
• 快速組裝人形機器人手臂,大幅縮短開發周期
推薦應用場景具體案例 >
廣泛應用于人形機器人、雙足機器人、 仿生機器人等
- 0.31kg最小自重
- 57.5mm最小直徑
- 48N·m最大平均負載轉矩
- 35rpm最大轉速
- 60arcsec重復定位精度

MJA-H11
直徑:57.5mm
重量:0.31kg
平均負載轉矩:6.2N·m
額定轉速:30rpm

MJA-H17S
直徑:76mm
重量:0.75kg
平均負載轉矩:25N·m
額定轉速:30rpm

MJA-H17T
直徑:76mm
重量:0.81kg
平均負載轉矩:48N·m
額定轉速:25rpm

MJA-H17Z
直徑:90mm
重量:0.81kg
平均負載轉矩:48N·m
額定轉速:25rpm
定制輕量化人形機器人手臂
全新工藝,匠心獨具
解決機器人在更多復雜工作環境的適應性和穩定性
技術參數
規格參數
資料下載
| 項目 | 單位 | MJA-H11 | MJA-H17S | MJA-H17T | MJA-H17Z |
| 諧波減速器參數 | |||||
| 減速比 | -- | 101 | 100 | 120 | 120 |
| 減速器背隙 | arcsec | ≤20 | ≤20 | ≤20 | ≤20 |
| 傳動精度 | arcmin | <1 | <1 | <1 | <1 |
| 平均壽命 | Hour | 20000 | 20000 | 20000 | 20000 |
| 輸出能力 | |||||
| 啟停容許轉矩 | N·m | 7.7 | 56 | 56 | 56 |
| 平均負載轉矩 | N·m | 6.2 | 25 | 48 | 48 |
| 最大瞬時轉矩 | N·m | 11.5 | 80 | 80 | 80 |
| 最大許用彎矩 | N·m | 16 | 30 | 30 | 30 |
| 額定轉速 | rpm | 30 | 30 | 25 | 25 |
| 最大轉速 | rpm | 35 | 35 | 29 | 29 |
| 重復定位精度 | arcsec | <60 | <60 | <60 | <60 |
| 絕對定位精度 | arcsec | <300 | <300 | <300 | <300 |
| 伺服系統 | |||||
| 電機功率 | W | 115 | 100 | 180 | 180 |
| 額定電壓 | VDC | 24 | 48 | 48 | 48 |
| 額定電流 | A(rms) | 6.5 | 3.8 | 5 | 5 |
| 峰值電流 | A(rms) | 13.5 | 11.6 | 14.5 | 14.5 |
| 增量編碼器 | P/R | 6280 | 8000 | 8000 | 8000 |
| 絕對值編碼器 | Bit | 17 | 17 | 17 | 17 |
| 通訊協議 | -- | EtherCAT / CANopen | |||
| 外形尺寸 | |||||
| 關節直徑 | mm | 57.5 | 76 | 76 | 90 |
| 關節長度 | mm | 65 | 78.5 | 85.5 | 85.5 |
| 通孔直徑 | mm | 5 | 7 | 7 | 9.8 |
| 關節重量 | kg | 0.31 | 0.75 | 0.81 | 0.81 |
| 其他 | |||||
| 傳感器類型 | 無 | ||||
| 抱閘 | 無 | ||||
| IP等級 | IP40 | ||||
| 工作環境 | 運行溫度:0~40°C(-40~60°C可選),存貯溫度:-40~80°C,環境濕度: 90%相對濕度(無冷凝) | ||||
注: 提供OEM/ODM定制化服務,如您有其它技術要求,請聯系我們咨詢。
