攻克工業機器人三大核心技術和市場任重道遠
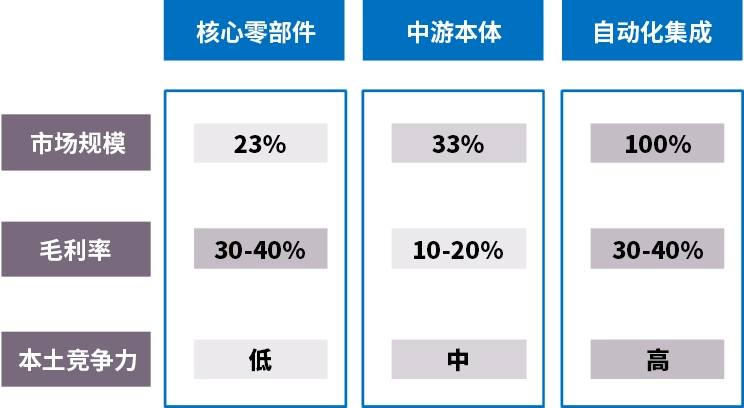
Date:2019-06-13工業機器人是指面向工業領域的多關節機械手或多自由度的機器設備。人的動作由大腦操控,大腦發出的指令經由小腦、神經的協助,驅動肌肉、骨骼做出反應。機器人也是如此,三大系統中控制系統的控制器起到大腦作用,動力系統中起到驅動作用的伺服器和起傳動作用的減速器,接收控制系統指令,傳導到與肌肉、骨骼同構,由機身、手臂等部件構成的機械系統,由其承載并實際完成運動。綜上,機器人產業鏈主要由上游以控制器、伺服器、減速器為代表的核心部件研發生產商,中游由機械部件構成的機器人本體研發制造商,下游涉及行業垂直解決方案的系統集成商組成。其中上、中、下游市場規模比約為2:3:10,本土競爭力分別為低、中、高。毛利率分別為30%-40%、10%-20%、30%-40%。下游市場以其規模大,本土競爭力強,毛利率高成為必爭之地。
下游集成方案商主要是指軟件進一步開發以及針對客戶定制系統集成。按照工作性質、場景可分為搬運(上下料、碼垛)、加工(打孔、焊接、噴漆、激光切割、拋光、涂裝)、檢查、組裝(裝配、包裝)等,主要應用于汽車、電子、金屬加工等細分行業。目前,由于缺乏技術壁壘,且國際品牌因服務縱深不夠難以切入,國內企業大都在此聚集。2017年工業機器人系統集成商超過3000家,國產覆蓋率達90%以上。龍頭以強大的資源整合能力、專業而深刻的行業理解,以及足以應對“3331”付款周期的資金規模等優勢收割市場、淘汰小玩家,使得競爭白熱化。
中游主體部分機械部件主要有,機座(部分有行走結構)、機身、臂部、腕部、手部等,整體趨勢是智能化、輕量化、可移動化。按照機械結構,可主要分為直角坐標型、圓柱坐標型、球面坐標型、關節坐標型。直角坐標型圍繞X、Y、Z三軸進行運動,適用于大工作空間的物料搬運;圓柱坐標型可作升降、回轉和伸縮動作;球坐標型能回轉、俯仰和伸縮;關節坐標型有多個轉動關節,以下幾種為主流:垂直多關節型,其中六軸包括旋轉S、下臂L、上臂U、手腕旋轉R、手腕擺動B、手腕回轉T共6個自由度,每個軸由伺服電機、軸減速器驅動,廣泛用于汽車、電子生產工序;平面多關節型SCARA,適用于小范圍、高速運動,如3C行業精密裝配;并聯關節型Delta,與串聯型相比精度較高、自由度較大、承載能力強,主要用于高速取放、篩選。自動導引運輸型AGV主要應用于智能倉儲。
目前主體以“四大家族”為主,2017年日本發那科、德國庫卡、瑞士ABB及日本安川的銷量占全球份額為49.3%,而中國市場上本土工業機器人品牌只占25%。由于不具備對于產業鏈上下游的控制力,就無法形成壁壘、獲得市場,且這一部分國際競爭較強,毛利率相對較低,除非有較強技術和資源整合能力的公司,目前國內廠家很少單獨切入這一模塊。
上游減速器、伺服器、控制器為工業機器人的三大核心零部件,成本占總體比近70%。其中減速機占比最高達40%且技術壁壘最強,直接影響機器人的速度、精度,因而對于該技術的突破能為企業賦予更高議價權。目前兩種主流減速器,RV及諧波中日本廠商納博特斯克和哈默納科分別占據60%、15%的市場。受制于技術及精密制造能力,核心部件國產化率在全產業鏈中處于最低。而工業機器人的國產化替代需要穿透到底層核心零部件,才能保證在中美貿易摩擦等國際大環境下順利實現國產化替代,因而攻克這一部分的技術和市場,對于中國企業來說任重道遠且勢在必行。
上一篇: 貿易戰對中國機器人行業有哪些影響?
下一篇: 為何大灣區機器人產業盈利的拐點尚未到來?